Мы vkontakte.ru
Друзья
Словарь синонимов русского языка
Поворот плоскости с помощью мыши
Перед тем, как перейти к довольно сложной теме, а именно, заданию аффинного преобразования в матричной форме, рассмотрим следующий вопрос. Как поворачивать изображение (плоскость) с помощью мыши?
Имеется пара точек M0(x0, y0), M(x, y) – начальное и конечное положения мыши. По
этим точкам нужно определить угол поворота плоскости. Как это сделать. Можно
попытаться экспериментировать с формулами, но вскоре станет понятно, что надо
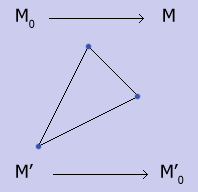
учитывать не только относительные изменения координат Δx, Δy, но и их абсолютные значения. Так,
например, на приведенном ниже изображении изменения по x для передвижений мыши M0M и M0’M’ совпадают, но интуитивно понятно, что
одно из этих передвижений вращает треугольник по часовой стрелке, а другое -
против.
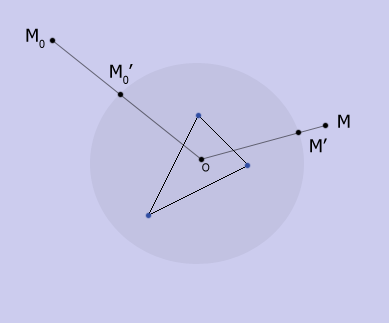
В данном случае, чтобы получить точки M0’ и M’ надо просто нормализовать векторы OM0 и OM. Теперь повернем плоскость, чтобы вектор OM0’ перешел в OM'. Оказывается это не так просто, как может
показаться на первый взгляд.
Угол между векторами
Посмотрим, как подсчитать угол между
векторами в декартовой системе координат. Первое, что приходит в голову, это
воспользоваться скалярным произведением.
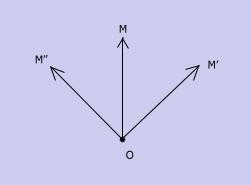
Проблема заключается в том, что для скалярного произведения вектора OM'' и OM' будут неразличимы. Можно получить косинус угла
между ними. Но если вращать плоскость от OM к OM', то вращение идет по часовой стрелке. В случае OM'' - против часовой. Т.о. образом кроме значения
угла необходимо знать его знак. Тут может помочь “векторное
произведение”.
Прим. Т.к. мы работаем в двухмерном
пространстве, то строго говорить о векторном произведении нельзя. Но можно
использовать тот результат, что эта операция различает порядок векторов.
Рассмотрим трехмерное пространство, причем наше двухмерное сечение это плоскость
z =
0. Это означает, что все
вектора в этой плоскости имеют третью координату равной 0. Векторно перемножим
вектора OM(x, y) и OM'(x’, y’):